一、串口中断+超时解析
1. CubeMX配置
1.1 属性配置
主要配置波特率,其余默认
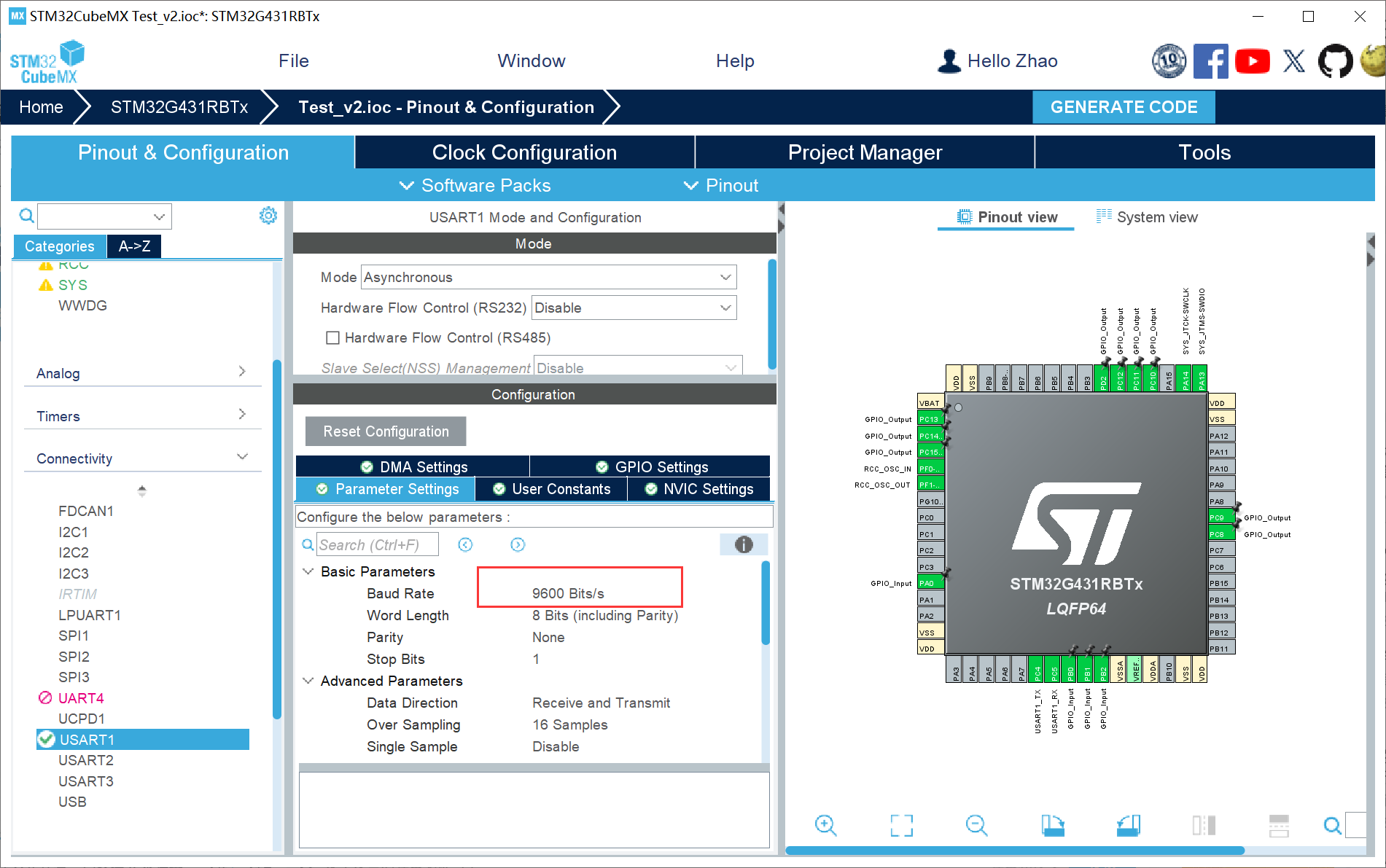
中断配置
Preemption Priority:抢占优先级
Sub Priority: 子优先级

串口的DMA设置
只开接收DMA即可
DMA的模式:
- Normol
- Circual


2. 驱动程序编写
2.1 串口重定向
在uasrt.c中进行修改

1 | int fputc(int ch, FILE * str) |
2.2 app_uart.c 变量定义
1 | uint16_t uart_rx_index = 0; |
2.3 中断初始化
放入Core->Src->usart.c中
在初始化中使能串口中断,往buffer中每次填充一个字节,触发中断回调
1 | HAL_UART_Receive_IT(&huart1,uart_rx_buffer,1); |

Hal库——中断回调函数
在 STM32 的 HAL(硬件抽象层)库中,中断回调函数用于处理各种外设的中断事件。这些回调函数由 HAL 库提供,用户只需实现这些函数以响应特定的中断。
1. 一般函数 vs. 回调函数
逻辑限定普通函数的调用:
- 逻辑条件通常在调用函数之前进行检查,确保在满足特定条件时再执行该函数。
- 这种方式在函数内部或外部使用条件语句(如
if)来控制函数的执行。
2
3
4
5
6
7
8
9
10
// 执行某些操作
}
int main() {
if (condition) { // 条件检查
normalFunction(); // 仅在条件满足时调用
}
return 0;
}回调函数:
- 回调函数通过传递函数指针来实现灵活的调用,调用发生在某个事件或特定条件下。
- 这种机制允许外部函数(如事件处理或异步操作)在需要时调用传递的回调,而不需要直接控制逻辑。
2
3
4
5
6
7
8
9
10
11
12
13
// 执行某些操作
}
void eventHandler(void (*callback)()) {
// 某个事件发生后调用回调
callback(); // 不需要在这里检查条件
}
int main() {
eventHandler(callbackFunction); // 传递回调函数
return 0;
}2. 中断函数 vs. 回调函数
- 中断函数:
- 直接处理外设中断的代码,通常是在中断服务例程 (ISR) 中实现。
- 代码较为复杂,涉及中断向量、优先级、屏蔽等设置。
- 可能会引入较长的中断处理时间,不适合执行复杂的任务。
- 回调函数:
- 是一个更高层次的抽象,允许用户在中断发生时执行特定的处理逻辑。
- HAL 库提供的回调函数允许用户定义中断后要执行的操作,而不需要直接修改中断服务例程。
- 更易于维护和调试,因为用户只需关注回调函数的逻辑,而不需要管理中断相关的低层实现。
2.4 回调函数声明
弱定义


自定义回调函数
可以自行声明与弱定义回调函数同名的函数(重写),会优先执行自定义的函数
Hal库中各种弱定义都是用__weak修饰的

过程:串口接收->触发回调->进入回调函数
PS: void HAL_UART_RxCpliCallback(UART_HandleTypeDef *huart) 不要用成 void HAL_UART_TxCpliCallback(UART_HandleTypeDef *huart)
1 | void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) |
2.5 串口解析
超时解析
1 | void uart_proc(void) |
# 无DMA和环形缓冲区的问题
当串口接收速率过快时,如视觉上位机频繁向单片机发送识别到的坐标数据,可能会导致单片机程序阻塞
1. 串口阻塞的解决方案

DMA:数据转运
RingBuffer:环形缓存区
2. # 环形缓冲区的概念:
- 头指针
- 尾指针

# 现象:
1. 串口无解析发送上位机
CubeMX未定义串口引脚,未注意STM32外设引脚可复用问题

2. 回调函数名称错误

二、DMA+空闲中断
# DMA的作用
无DMA:数据->Uart寄存器->CPU访问Uart寄存器->执行其他程序部分
-------如果串口通信速率过快------>CPU频繁访问Uart寄存器-------->程序阻塞
有DMA:数据->Uart->DMA访问Uart数据->存放到单片机内存地址
CPU与DMA并行工作
在上述配置的基础上对程序文件进行进一步修改。
# 空闲中断
1. 什么是空闲中断?
空闲中断(Idle Line Interrupt)是串口通信(UART)中常用的一种硬件中断机制。它用于检测串口接收线路在一段时间内没有接收到数据时触发。空闲中断的核心原理是检测 UART 外设的接收线路在数据传输结束后变为“空闲”状态(即,停止接收数据,线路上没有任何活动)。
当串口在接收数据时,硬件会自动维护一个“忙状态”标志。所有数据帧(包括起始位、数据位和停止位)都被接收完成后,接收线路进入空闲状态,此时 UART 硬件会触发“空闲中断”。这个中断标志仅在接收数据后首次空闲时触发,而不是每次线路空闲都会触发。因此,空闲中断能够用于判断数据帧的结束或检测数据包的传输完成。(比如,一个数据帧的长度为8个字节,在串口通信时每帧间隔一个字节来发送,在间隔的这个字节,触发空闲中断,进而可以在中断程序中处理数据帧)
2. 空闲中断在串口通信中的作用
空闲中断主要用于处理非固定长度的串口数据帧和高效的 DMA(Direct Memory Access,直接内存访问)数据传输。其作用和优势如下:
2.1 非固定长度数据包接收
- 当接收的数据是非固定长度时,很难在接收时预先设定要接收的数据长度。这时,可以利用空闲中断判断数据的结束。
- 当串口在 DMA 模式下接收数据时,无法使用常规的中断方式逐字节进行处理。使用空闲中断可以更高效地处理数据流,从而判断整个数据包的接收是否完成。
2.2 提高串口通信的效率
- 使用空闲中断能够在 DMA 模式下提高串口通信的效率。当 DMA 缓冲区被填满或者数据接收超时时,空闲中断可以用于自动触发数据处理,避免了使用传统的定时器轮询方式。
- 通过判断空闲中断触发时间,可以精确判断数据包的传输完成,不必每次都等待接收缓冲区被填满才进行处理,从而提高系统响应速度。
2.3 降低 CPU 占用
- 使用空闲中断配合 DMA 接收,可以降低 CPU 的使用率。在 DMA 接收过程中,数据自动从串口移入缓冲区,不需要 CPU 的参与,只有在接收结束或空闲中断触发时才进行数据处理。
- 对于接收频繁但数量不定的数据流(如传感器数据、通信协议数据包),使用空闲中断能极大地减少 CPU 的负担。
3. 空闲中断在串口通信中的典型应用场景
3.1 接收数据包的完整性判断
对于 UART 接收非固定长度的数据包(如 Modbus、串口通信协议),可以使用空闲中断来判断数据帧的结束。
典型场景:
假设通过 UART 接收的数据包长度不定,当接收到一个完整的数据帧时,串口线路会进入空闲状态,此时触发空闲中断,可以认为本次数据接收结束。
2
3
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size) {
if (__HAL_UART_GET_FLAG(huart, UART_FLAG_
1. 变量声明
声明 uart_rx_dma_buffer变量,用于数据转运

2. 中断初始化
启用DMA相关中断
关闭DMA半中断

PS: 不再适用串口回调,改用DMA的方法

3. 串口中断函数
每次触发串口中断,触发DMA中断

取消使用串口中断回调函数

改用空闲中断回调函数
PS: 不再需要串口超时解析


# 现象:

# 补充——中断函数与回调函数的区别
在嵌入式编程中,HAL(硬件抽象层)库的中断函数和回调函数是常见的机制,尤其是在处理外设操作时。这两者的作用有时容易混淆,但它们的概念和使用场景有所不同。下面详细解释它们的区别:
1. 中断函数(Interrupt Service Routine, ISR)
中断函数是一段处理硬件中断的代码。当外设或处理器触发中断时,处理器会暂停当前的代码执行,转而执行与该中断对应的ISR。一旦中断被处理完毕,程序会恢复到原来的执行状态。
- 执行方式:硬件触发,直接由处理器执行,通常是高优先级。
- 响应时间:要求短小精悍,不能执行耗时的任务,因为会阻塞其他中断。
- 位置:ISR通常定义在HAL库或用户代码中,是一个固定的函数(如
TIM_IRQHandler等)。- 调用方式:自动触发,由硬件中断控制器(NVIC)决定何时调用中断处理函数。
2. 回调函数(Callback Function)
回调函数是一个函数指针,通过预先注册到某个模块或API中,等到某个事件发生时,由该模块或API负责调用。HAL库中的回调函数通常是在中断处理完毕后,由ISR或HAL库内部调用,用来进一步处理用户逻辑。
- 执行方式:由程序代码(比如ISR或定时器事件)调用,响应某个事件。
- 响应时间:回调函数不要求像中断处理函数那样必须快速完成,往往用于处理稍复杂的业务逻辑。
- 位置:回调函数通常由用户实现,并由HAL库的中断处理函数或其他机制调用(如
HAL_TIM_PeriodElapsedCallback)。- 调用方式:回调函数不是直接由硬件触发,而是由软件触发,即当中断函数处理完硬件中断后,再调用用户注册的回调函数。
简单总结区别:
- 触发机制:中断函数是由硬件事件(如定时器溢出、外部信号等)直接触发,而回调函数是由软件(如ISR)触发。
- 职责范围:中断函数负责处理硬件中断,通常需要快速执行;回调函数则处理用户定义的业务逻辑,通常可以有更多的处理空间和时间。
- 优先级:中断函数的优先级较高,回调函数的执行时间不受硬件中断控制,通常在中断函数结束之后才执行。
典型应用场景
以定时器为例:
- 当定时器溢出时,触发一个中断,执行定时器的中断函数
TIM_IRQHandler。- 在中断函数内部,可能会调用HAL库的定时器回调函数
HAL_TIM_PeriodElapsedCallback,用于用户自定义的定时器周期性任务处理。这就是中断函数和回调函数的核心区别。
三、环形缓冲区
# 环形缓冲区的简介
环形缓存区,也叫环形缓冲区(Ring Buffer)或循环缓冲区,是一种数据结构。它的特点 是缓存区的头和尾是连接在一起的,形成一个环。当数据写入缓冲区时,指针会不断前进,当到达缓冲区的末尾时,会重新回到开头,这样就实现了一个循环。
环形缓冲区的组成:
- 缓冲区数组:存放数据
- 头指针(读指针)
- 尾指针(写指针)
环形缓冲区满足“先进先出的原则”
环形缓冲区的优势:
- 在普通串口接收中,数据是线性接收的,通常是通过中断或者轮询的方式处理数据。
- 而环形缓冲区适用于需要持续接收和处理数据的应用,如串口通信
- 环形缓冲区效率和可靠性高,但是需要复杂的管理逻辑
环形缓冲区的原理及实现:
环形缓冲区(ring buffer)原理与实现详解-CSDN博客
简单代码实现:
缓冲区结构体定义
2
3
4
5
6
7
8
typedef struct {
uint32_t w;
uint32_t r;
uint8_t buffer[RINGBUFFER_SIZE];
uint32_t itemCount;
}ringbuffer_t;初始化环形缓冲区
置零环形缓冲区中的元素
这里用到
memset函数
- 解释:复制字符 c(一个无符号字符)到参数 str 所指向的字符串的前 n 个字符。
- 作用:是在一段内存块中填充某个给定的值,它是对较大的结构体或数组进行清零操作的一种最快方法
- 头文件:C中
#include<string.h>,C++中#include<cstring>这里指向的是环形缓冲区内容buffer,为uint8_t类型的数组变量,数组大小为
RINGBUFFER_SIZE,使用这段语句将buffer中的内存块内容置零。
2
3
4
5
6
7
8
9
10
11
void ringbuffer_init(ringbuffer_t *rb)
{
// 设置读指针和写指针初始值为0
rb->r = 0;
rb->w = 0;
// 将缓冲区内存清零
memset(rb->buffer, 0, sizeof(uint8_t) * RINGBUFFER_SIZE);
// 初始化项目计数为0
rb->itemCount = 0;
}检查缓冲区是否已满
2
3
4
5
6
uint8_t ringbuffer_is_full(ringbuffer_t *rb)
{
// 如果项目计数等于缓冲区大小,返回1(已满),否则返回0(未满)
return (rb->itemCount == RINGBUFFER_SIZE);
}检查缓冲区是否为空
2
3
4
5
6
uint8_t ringbuffer_is_empty(ringbuffer_t *rb)
{
// 如果项目计数为0,返回1(为空),否则返回0(非空)
return (rb->itemCount == 0);
}向环形缓冲区写入数据
这里限制了向环形缓冲区写入数据的个数:即限定在环形缓冲区数组索引大小内
数据根据写指针当前指向的位置,进行写入。数据完成写入后,写指针递增。如果写指针当前到达缓冲区索引尾部,那么返回索引头部,即指向0
此段代码管理逻辑中,如果当前的环形缓冲区已经写满,需要经过将缓冲区的数据取出后,才能继续对缓冲区进行写入操作
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
int8_t ringbuffer_write(ringbuffer_t *rb, uint8_t *data, uint32_t num)
{
// 如果缓冲区已满,返回-1
if(ringbuffer_is_full(rb))
return -1;
// 将数据写入缓冲区
while(num--)
{
rb->buffer[rb->w] = *data++; // 写入数据并移动写指针
rb->w = (rb->w + 1) % RINGBUFFER_SIZE; // 写指针循环递增
rb->itemCount++; // 增加项目计数
}
return 0; // 写入成功返回0
}从缓冲区读取数据
缓冲区有数据,操作才有效
数据根据读指针当前指向的位置,进行读取。数据完成读取后,读指针递增。如果读指针当前到达缓冲区索引尾部,那么返回索引头部,即指向0。
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
int8_t ringbuffer_read(ringbuffer_t *rb, uint8_t *data, uint32_t num)
{
// 如果缓冲区为空,返回-1
if(ringbuffer_is_empty(rb))
return -1;
// 从缓冲区读取数据
while(num--)
{
*data++ = rb->buffer[rb->r]; // 读取数据并移动读指针
rb->r = (rb->r + 1) % RINGBUFFER_SIZE; // 读指针循环递增
rb->itemCount--; // 减少项目计数
}
return 0; // 读取成功返回0
}

1. 移植环形缓冲区驱动文件
1 | ringbuffer_t usart_rb; //定义ringbuffer_t类型结构体变量 |
- 判断ringbuffer是否满
- 写入数据
- 清空结构体
2. 空闲中断回调函数
1 | /** |
2. 修改串口解析
1 | void uart_proc() |
STM32串口通信方法总结:
-
超时解析
-
DMA空闲中断
-
环形缓存区
四、ADC和DMA
STM32的ADC(模数转换器)通道IN11指的是STM32微控制器上一个特定的ADC输入通道。每个STM32芯片的ADC都有多个模拟输入引脚,这些引脚标记为
INx(例如IN0、IN1、IN2等),对应不同的GPIO引脚。具体到IN11,它是ADC的第11个输入通道,通常与一个特定的GPIO引脚连接。该引脚用于将模拟信号输入到ADC进行模数转换。
CT117E原理图:

1. CubeMX配置
1.1 ADC通道分配:
- ADC1: IN11
- ADC2: IN15

1.2 配置DMA
1.2.1 配置DMA通道

1.2.2 配置为循环模式

1.2.3 配置DMA速度
设置为中、高均可

1.3 配置ADC属性
- 四分频
- DMA使能
- 循环使能

1.4 配置ADC中断
优先级为2即可

2. 驱动程序编写
2.1 创建adc_app.c
变量声明

1 |
|
在主程序初始化启用DMA 转运 ADC 数据

2.2 定义ADC进程

- 读取电压dma储存数据
- 转换为模拟电压值
同样的,记得在任务调度器中添加proc
2.3 lcd显示

# 动态窗口
- 使用环形缓存区
- 定义结构体


多串口通信
示例一
使用DMA+环形缓冲区+空闲中断回调的方法,使用串口通信,在解析函数中每次解析对象为串口一次性连续接收到的数据。
所以,在解析函数uart_proc中一次完成对串口数据内容的解析即可,不需要再用状态机的判断逻辑。
1 |
|

![【stm32单片机】[操作系统][RT-Thread][3]线程通信](/img/blog_cover/rt-thread.jpg)